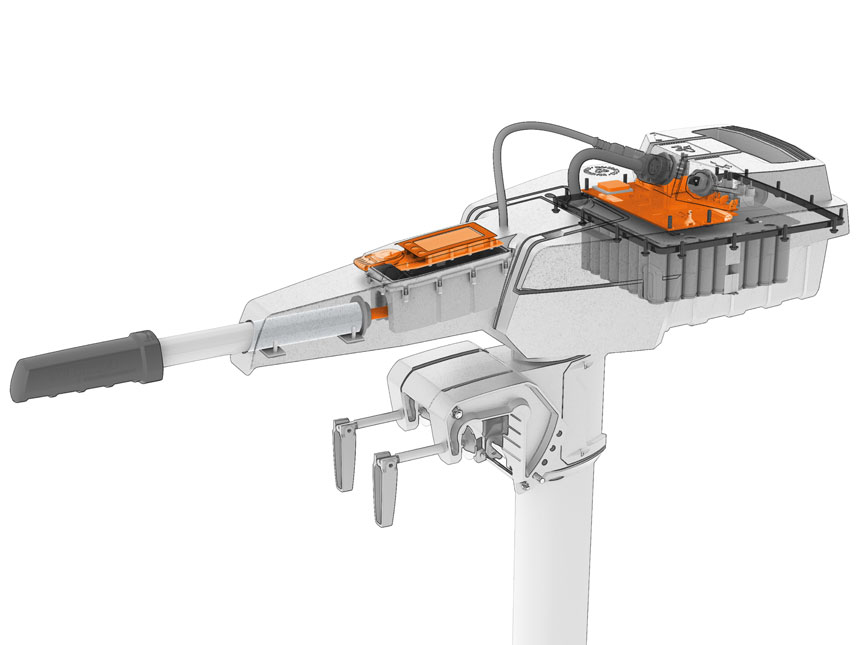
Superior Convenience
Performance is best enjoyed when it’s combined with convenience. Designing convenience into electrical drive systems is a rewarding task – all system information is available in digital form and can be easily made available to you, the user. Motors and batteries can be simply switched off at the touch of a button. Individual components and entire systems can be designed to be completely waterproof. And products are easy and clean to handle and transport.
On-Off Switch
› More Details
› More Details
Waterproof Emergency Kill Switch
› More Details
› More Details
Waterproof Connections
› More Details
› More Details
Information Display
› More Details
› More Details
Audible Alarm
› More Details
› More Details
Integrated GPS
› More Details
› More Details
Battery Information
› More Details
› More Details
Combined Charging/Power Socket
› More Details
› More Details
On-Off Switch
› More Details
› More Details
Waterproof Emergency Kill Switch
› More Details
› More Details
Waterproof Connections
› More Details
› More Details
Information Display
› More Details
› More Details
Audible Alarm
› More Details
› More Details
Integrated GPS
› More Details
› More Details
Battery Information
› More Details
› More Details
Combined Charging/Power Socket
› More Details
› More Details
On-Off Switch
› More Details
› More Details
Waterproof Emergency Kill Switch
› More Details
› More Details
Waterproof Connections
› More Details
› More Details
Information Display
› More Details
› More Details
Audible Alarm
› More Details
› More Details
Integrated GPS
› More Details
› More Details
Battery Information
› More Details
› More Details
Combined Charging/Power Socket
› More Details
› More Details


